








Технички параметри
| TR1305H | |||
| Работен уред | Дијаметар на дупчена дупка | mm | Φ600-Φ1300 |
| Ротационен вртежен момент | KN.m | 1400/825/466 Моментално 1583 | |
| Ротациона брзина | вртежи во минута | 1,6/2,7/4,8 | |
| Помал притисок на ракавот | KN | Макс. 540 | |
| Сила на влечење на ракавот | KN | 2440 Моментален 2690 | |
| Удар со притисок | mm | 500 | |
| Тежина | тон | 25 | |
| Хидраулична централа | Модел на мотор |
| Куминс QSB6.7-C260 |
| Моќност на моторот | Kw/rpm | 201/2000 | |
| Потрошувачка на гориво на моторот | г/квч | 222 | |
| Тежина | тон | 8 | |
| Контролен режим |
| Жичен далечински управувач/ Безжичен далечински управувач | |
| TR1605H | ||
| Дијаметар на дупчена дупка | mm | Φ800-Φ1600 |
| Ротационен вртежен момент | KN.m | 1525/906/512 Моментално 1744 |
| Ротациона брзина | вртежи во минута | 1.3/2.2/3.9 |
| Помал притисок на ракавот | KN | Макс. 560 |
| Сила на влечење на ракавот | KN | 2440 Моментален 2690 |
| Удар со притисок | mm | 500 |
| Тежина | тон | 28 |
| Модел на мотор |
| Куминс QSB6.7-C260 |
| Моќност на моторот | Kw/rpm | 201/2000 |
| Потрошувачка на гориво на моторот | г/квч | 222 |
| Тежина | тон | 8 |
| Контролен режим |
| Жичен далечински управувач/ Безжичен далечински управувач |
| TR1805H | ||
| Дијаметар на дупчена дупка | mm | Φ1000-Φ1800 |
| Ротационен вртежен момент | KN.m | 2651/1567/885 Моментален 3005 |
| Ротациона брзина | вртежи во минута | 1.1/1.8/3.3 |
| Помал притисок на ракавот | KN | Макс. 600 |
| Сила на влечење на ракавот | KN | 3760 Моментален 4300 |
| Удар со притисок | mm | 500 |
| Тежина | тон | 38 |
| Модел на мотор |
| Куминс QSM11-335 |
| Моќност на моторот | Kw/rpm | 272/1800 |
| Потрошувачка на гориво на моторот | г/квч | 216 |
| Тежина | тон | 8 |
| Контролен режим |
| Жичен далечински управувач/ Безжичен далечински управувач |
| TR2005H | ||
| Дијаметар на дупчена дупка | mm | Φ1000-Φ2000 |
| Ротационен вртежен момент | KN.m | 2965/1752/990 Моментален 3391 |
| Ротациона брзина | вртежи во минута | 1.0/1.7/2.9 |
| Помал притисок на ракавот | KN | Макс. 600 |
| Сила на влечење на ракавот | KN | 3760 Моментален 4300 |
| Удар со притисок | mm | 600 |
| Тежина | тон | 46 |
| Модел на мотор |
| Куминс QSM11-335 |
| Моќност на моторот | Kw/rpm | 272/1800 |
| Потрошувачка на гориво на моторот | г/квч | 216 |
| Тежина | тон | 8 |
| Контролен режим |
| Жичен далечински управувач/ Безжичен далечински управувач |
| TR2105H | ||
| Дијаметар на дупчена дупка | mm | Φ1000-Φ2100 |
| Ротационен вртежен момент | KN.m | 3085/1823/1030 Моментален 3505 |
| Ротациона брзина | вртежи во минута | 0,9/1,5/2,7 |
| Помал притисок на ракавот | KN | Макс. 600 |
| Сила на влечење на ракавот | KN | 3760 Моментален 4300 |
| Удар со притисок | mm | 500 |
| Тежина | тон | 48 |
| Модел на мотор |
| Куминс QSM11-335 |
| Моќност на моторот | Kw/rpm | 272/1800 |
| Потрошувачка на гориво на моторот | г/квч | 216 |
| Тежина | тон | 8 |
| Контролен режим |
| Жичен далечински управувач/ Безжичен далечински управувач |
| TR2605H | ||
| Дијаметар на дупчена дупка | mm | Φ1200-Φ2600 |
| Ротационен вртежен момент | KN.m | 5292/3127/1766 Моментален 6174 |
| Ротациона брзина | вртежи во минута | 0,6/1,0/1,8 |
| Помал притисок на ракавот | KN | Макс. 830 |
| Сила на влечење на ракавот | KN | 4210 Моментален 4810 |
| Удар со притисок | mm | 750 |
| Тежина | тон | 56 |
| Модел на мотор |
| Куминс QSB6.7-C260 |
| Моќност на моторот | Kw/rpm | 194/2200 |
| Потрошувачка на гориво на моторот | г/квч | 222 |
| Тежина | тон | 8 |
| Контролен режим |
| Жичен далечински управувач/ Безжичен далечински управувач |
| TR3205H | ||
| Дијаметар на дупчена дупка | mm | Φ2000-Φ3200 |
| Ротационен вртежен момент | KN.m | 9080/5368/3034 Моментално 10593 |
| Ротациона брзина | вртежи во минута | 0,6/1,0/1,8 |
| Помал притисок на ракавот | KN | Макс. 1100 |
| Сила на влечење на ракавот | KN | 7237 Моментален 8370 |
| Удар со притисок | mm | 750 |
| Тежина | тон | 96 |
| Модел на мотор |
| Куминс QSM11-335 |
| Моќност на моторот | Kw/rpm | 2X272/1800 |
| Потрошувачка на гориво на моторот | г/квч | 216X2 |
| Тежина | тон | 13 |
| Контролен режим |
| Жичен далечински управувач/ Безжичен далечински управувач |
Вовед во методот на градење
Ротаторот со куќиште е нов тип на дупчалка со интеграција на целосна хидраулична моќност и пренос, како и комбинирана контрола на машината, моќноста и течноста. Тоа е нова, еколошка и високо ефикасна технологија за дупчење. Во последниве години, таа е широко прифатена во проекти како што се изградбата на урбано метро, зглобни столбови или длабоки темелни јами, расчистување на купишта отпад (подземни пречки), брза железница, пат и мост, и урбани градежни столбови, како и зајакнување на брана на резервоар.
Успешното истражување на овој сосема нов метод на процес ги реализираше можностите на градежните работници да вршат изградба на обвивка од цевка, поместувачки столб и подземен континуиран ѕид, како и можностите тунелот за подигнување на цевките и штитникот да поминува низ различните темели на столбови без бариери, кога не се отстранети пречките, како што се формациите од чакал и камења, формациите на пештери, дебелиот слој од жив песок, силните формации на грб, разните темели на столбови и армирано-бетонската конструкција.
Методот на изградба на ротатор на обвивки успешно ги заврши градежните мисии на повеќе од 5000 проекти на места во Сингапур, Јапонија, округот Хонгконг, Шангај, Хангжу, Пекинг и Тјенџин. Секако ќе игра поголема улога во иднината на урбаната градба и другите области на изградба на темели од столбови.
(1) Темелен столб, континуиран ѕид
Темелни столбови за брза железница, пат, мост и изградба на куќи.
Конструкции со зглобни столбови кои треба да се ископаат, како што се платформи на метро, подземни архитектури, континуирани ѕидови
Ѕид за задржување на вода на армирање на резервоарот.
(2) Дупчење чакал, камења и карстни пештери
Дозволено е изведување на темелни столбови на планински земјишта со чакал и камењарни формации.
Дозволено е да се изведуваат работи и да се лијат темелните столбови при дебела формација на жив песок и спуштечки слој или слој за полнење.
Изведете дупчење со вдлабнатини во карпестиот слој, излијте го темелниот столб.
(3) Расчистете ги подземните пречки
За време на урбаната изградба и обновата на мостовите, пречките како што се армирано-бетонските столбови од челични цевки, челичните столбови од H, PC столбовите и дрвените столбови може да се отстранат директно, а темелните столбови да се фрлат на лице место.
(4) Исечете го карпестиот слој
Изведете го дупчењето со вдлабнатини во карпести плочи до поставените столбови.
Дупчете дупки на карпестата подлога (шахти и отвори за вентилација)
(5) Длабинско ископување
Спроведете леење на самото место или вметнување на челични цевки за длабоко подобрување на темелите.
Копање длабоки бунари за градежна употреба при изградба на резервоари и тунели.
Предностите на усвојувањето на ротатор на куќиштето за градежништво
1) Без бучава, без вибрации и висока безбедност;
2) Без кал, чиста работна површина, добра еколошка припадност, избегнување на можноста калта да влезе во бетонот, висок квалитет на купот, зголемување на напрегањето на врзувањето на бетонот со челичната шипка;
3) За време на градежното дупчење, карактеристиките на слојот и карпата можат директно да се разликуваат;
4) Брзината на дупчење е голема и достигнува околу 14 м3/ч за општиот слој на почвата;
5) Длабочината на дупчење е голема и достигнува околу 80 метри според состојбата на почвениот слој;
6) Вертикалноста на формирањето дупки е лесна за совладување, што може да биде точно до 1/500;
7) Нема да се предизвика колапс на дупките, а квалитетот на формирање на дупките е висок.
8) Дијаметарот на формирање на дупки е стандарден, со мал фактор на полнење. Во споредба со другите методи на формирање дупки, може да заштеди многу на употреба на бетон;
9) Чистењето на дупката е темелно и брзо. Калта за дупчење на дното на дупката може да биде чиста до околу 3,0 см.
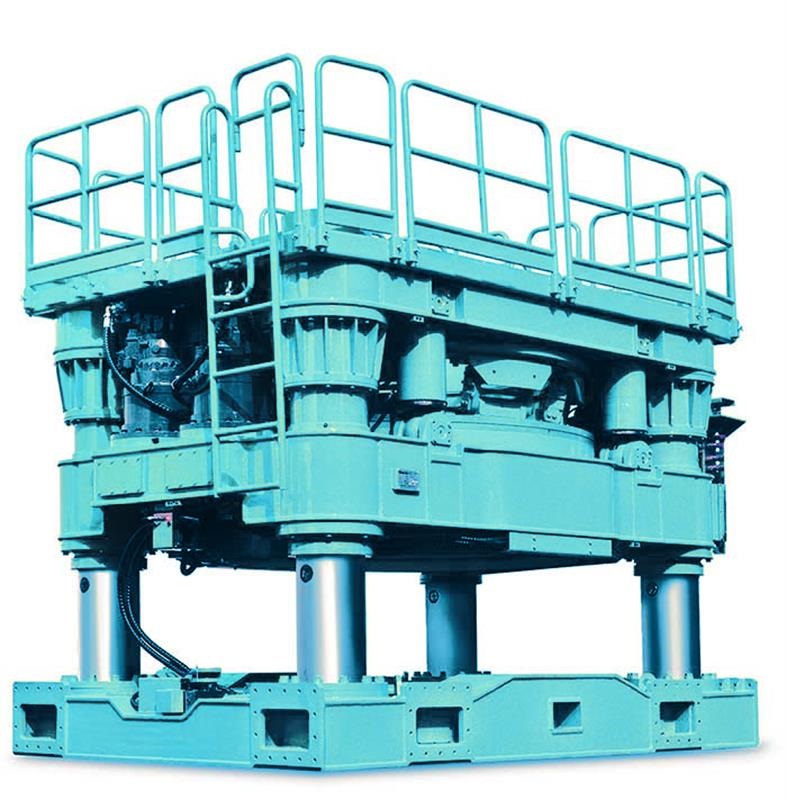
Слика на производот











П1: Дали сте производител, трговска компанија или трета страна?
A1: Ние сме производител. Нашата фабрика се наоѓа во покраината Хебеј во близина на главниот град Пекинг, на 100 км од пристаништето Тјанџин. Исто така, имаме и сопствена трговска компанија.
П2: Се прашувам дали прифаќате мали нарачки?
A2: Не грижете се. Слободно контактирајте не. За да добиеме повеќе нарачки и да им обезбедиме поголема удобност на нашите клиенти, прифаќаме мали нарачки.
П3: Можете ли да испраќате производи во мојата земја?
A3: Секако, можеме. Доколку немате сопствен шпедитер, можеме да ви помогнеме.
П4: Можете ли да направите OEM за мене?
A4: Прифаќаме сите OEM нарачки, само контактирајте не и дајте ми го вашиот дизајн. Ќе ви понудиме разумна цена и ќе направиме примероци за вас што е можно поскоро.
П5: Кои се вашите услови за плаќање?
A5: Со T/T, L/C на видно место, 30% депозит однапред, салдо 70% пред испорака.
П6: Како можам да ја направам нарачката?
A6: Прво потпишете го ПИ, платете депозит, а потоа ние ќе го организираме производството. По завршувањето на производството, треба да го платите преостанатиот износ. Конечно, ние ќе ја испратиме стоката.
П7: Кога можам да ја добијам понудата?
A7: Обично ви даваме понуда во рок од 24 часа откако ќе го добиеме вашето барање. Доколку ви е многу итно да добиете понуда, ве молиме јавете ни се или кажете ни по е-пошта, за да можеме да го сметаме вашето барање за приоритет.
П8: Дали вашата цена е конкурентна?
A8: Испорачуваме само производи со добар квалитет. Сигурно ќе ви ја дадеме најдобрата фабричка цена врз основа на супериорен производ и услуга.